机器东说念主原料识别冠军决策共享|2025无锡海外东说念主工智能翻新欺诈大赛
发布日期:2026-01-04 11:17 点击次数:69
作家丨IECV团队
裁剪丨极市平台

IECV团队
布景先容:本决策为2025无锡海外东说念主工智能翻新欺诈大赛算法赛说念-机器东说念主原料识别赛题冠军决策,来自IECV团队。
01 赛题任务
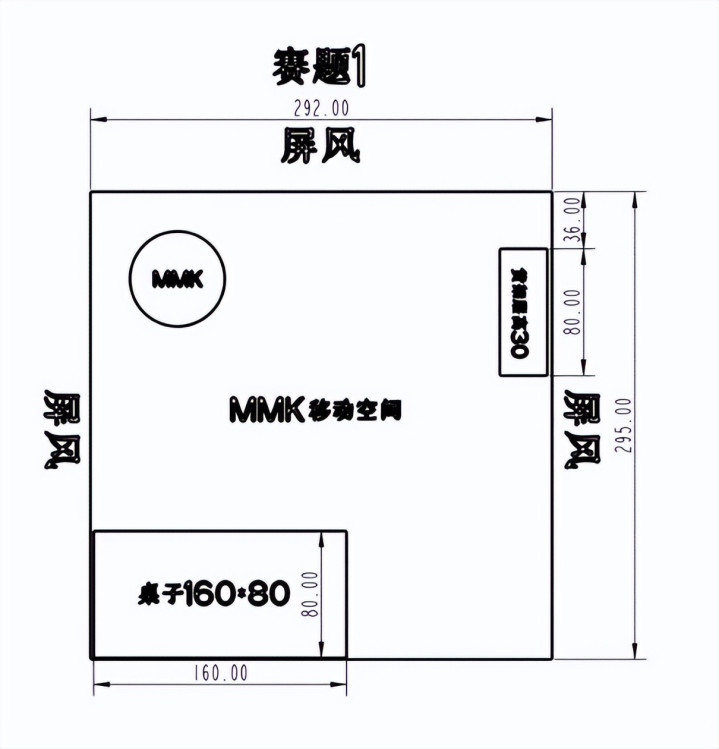
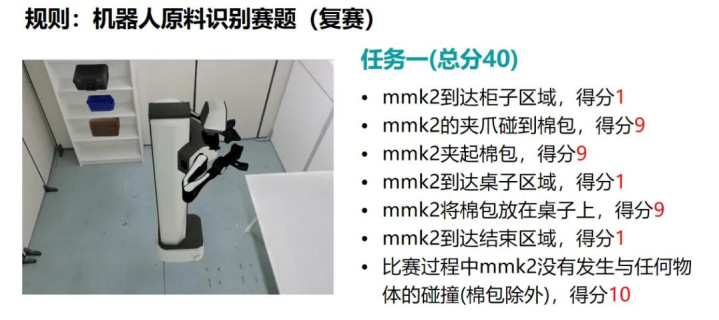
MMK2纺织厂棉花包分类搬运仿真挑战的中枢是允许参与者通过使用官方提供的转移双臂机器东说念主来施行当场任务来取得积分。左证天然讲话的讲明,机器东说念主会捡起计议的物体,并将它们放在指定的位置,以取得积分。
这一挑战的方针是评估在内容欺诈程序环境中的操作性能。参与者用官方提供的 DISCOVERSE 仿真平台及 AIRBOT MMK2 机器东说念主仿真模子,在诬捏纺织厂场景中完成棉花包的识别、执取、搬运及分类上架任务,用模拟数据来进修机器东说念主的战略。参与者将左证所取得的总分进行排行。
教导状态和样本
任务
教导状态
教导样本
任务1
从柜子位置取说念具称呼,放到桌子位置
在场景内找到棉包放到桌子上
任务2
找到对应心境的棉包说念具,并将其定向放到指定说念具的指定主义位置
找到一个粉色的棉包,并把它放在安全帽的右边

02 赛题决策
本决策的主要方针是擢升机器东说念主在物料搬运任务中的终结和踏实性。通过精确的视觉识别和高效的通顺戒指,机器东说念主粗豪在复杂的环境中施行精确的物料搬运责任。咱们的行为基于深度学习和强化学习期间,纠合仿真环境下的内容挑战,已毕了高精度的物料识别和优化的通顺打算。机器东说念主原料识别赛题不错拆分为视觉识别任务和通顺戒指任务,本团队的梗概决策如下。
1、视觉任务(YOLOv11n)
预赛才智在极市平台上完成视觉任务模子开导进修。在视觉识别任务中,咱们使用YOLOv11n看成基础模子,针对仿真环境中物体时势和光照变化较为固定的特色,通过一系列图像增强期间有用丰富了物体的圭臬和外不雅。这使得模子粗豪在各样化的场景中保持较高的踏实性和精度。

咱们礼聘的图像增强行为粗豪在保证进修踏实性的同期,擢升识别精度,尤其是在靠近物体的圭臬和位置变化时。 通过这些优化,模子的精度接近100%,极地面减少了失误识别的风险。
2、通顺戒指任务
在通顺戒指方面,咱们联想了一套严格的礼貌,确保机器东说念主在施行任务时不会发生碰撞,同期保持机械手的动作尽量处于房间的中心位置。 相配是当需要退换升降高度时,咱们通过设定收尾区域,确保机器东说念主远隔墙体、柜子和桌子等梗阻物,从而幸免阻挡和碰撞的发生。
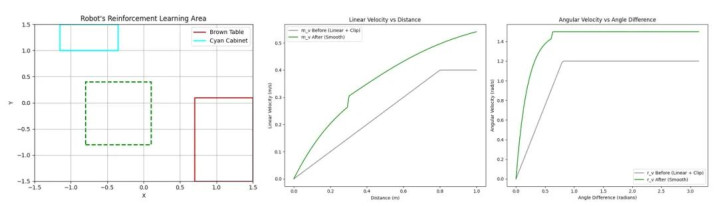
为了进一步优化机器东说念主的通顺速率,咱们礼聘了强化学习算法,具体来说是基于DQN的强化学习行为。 在这一历程中,咱们联想了基于转移偏差和单元耗时的奖励函数,通过当场生成的旋转角度来进修机器东说念主的角速率戒指函数,从而擢升机器东说念主的转向反映速率。 关于直线通顺,咱们树立了相对空旷的区域(如绿色虚线区域),在其中当场生成方针位置,让机器东说念主学习如安在最短时安分已毕安谧的线速率戒指。
通过强化学习模子的不绝优化,机器东说念主粗豪在施行任务时动态退换其通顺战略,合乎不同的环境变化,并已毕高效的物料搬运。 通过这一优化,机器东说念主的合座任务完成耗时减少了50%。
03 将来瞻望
天然当今的决策也曾取得了显赫的发扬,但仍有好多方面不错进一步优化。 举例,不错尝试引入愈加复杂的深度强化学习算法,如PPO等,以进一步提高机器东说念主在动态环境下的合乎能力和决策精度。
此外,咱们还不错洽商在机器东说念主系统中加入更多的传感器信息,如视觉和触觉反馈,擢升系统的感知能力,从而更好地搪塞不细目的环境变化。 将来,跟着诡计能力的擢升,咱们还不错探索更多的算法优化行为,进一步减少任务的总耗时,并擢升合座终结。


跑好“十五五”关节一程,全面鼓动强省建造|政不雅广东

宝呀, 你得学会撩~某东谈主才爱
机器东说念主原料识别冠军决策共享|2025无锡海外东说念主工
统考扩围、部分文科专科加考数学 2026年研考命题有新变化
冬趣(242)|上游主题影相征稿作品展——谭又铭作品
中建八局发展缔造公司与青岛交通法则支队鸠集开展红色研学活动